Autopilot und FMC
Lektion 3: NAV/GPS & ILS-Landung
Nun kümmern wir uns mal um die weitere Automatisierung unseres Autopilot-Betriebes. Es geht in dieser Lektion im Speziellen um den NAV- oder LOC-Modus des Autopiloten sowie um die automatische Landung.
Sehen wir uns eine Beispiel-Situation in einer 737 an:

(Per Klick auf das Bild vergrößern)
Das Flugzeug fliegt per Autopilot im ALT-Modus; hält also 4000ft, im SPEED-Modus; hält also 240kts und im HDG-Modus; hält also 360°=0°.
Das erkennt man an den grünen Leuchten der entsprechenden Knöpfe im Autopilot-Instrumentenbrett. Außerdem kann man die aktiven Autopilot-Funktionen immer im Primary Flight Display (PFD) direkt über dem künstlichen Horizont ablesen.
Sieht man genau hin, erkennt man aber auch, dass natürlich der Autopilot eingeschaltet ist (CMD A) und der Flight Director aus.
Außerdem leuchtet der Knopf für VOR LOC. Dieser Knopf heißt in anderen Maschinen auch oft NAV. Diese Funktion ist allerdings nur vorgewählt, daher erscheint kein entsprechender Schriftzug im PFD. Für den VOR LOC - Modus ist die Einstellung COURSE entscheidend. Man sieht, dass 270° eingestellt sind. Außerdem ist das VOR ERF im Funk-Panel eingestellt (lässt sich alles auch im Navigation Display nachvollziehen). Was bedeutet das nun?
Wir haben damit im Grunde einen virtuellen Pfeil (sog. Radial) mit der Richtung 270° durch das VOR Erfurt gelegt (siehe Kartendarstellung).
Ist der VOR LOC - Modus aktiv, so fliegt der Autopilot eine entsprechende Kurve und fliegt genau auf dem Radial in Richtung 270° - unabhängig von Windeinflüssen - diese werden ausgeglichen.
In unserem Beispiel fliegen wir gerade von Süden her auf das gewünschte Radial hinzu. Allerdings sind wir noch weit davon entfernt, sodass VOR LOC noch keine Funktion hat. Nur aus diesem Grund können HDG und VOR LOC gleichzeitig angewählt sein. Wären wir näher am Radial, sodass das VOR LOC die Kontrolle übernähme, würde HDG rausspringen. Andererseits sollte man immer zuerst HDG anschalten und dann VOR LOC, damit man sicher sein kann, dass das Flugzeug nicht einfach unkntrolliert herumfliegt. Wie gesagt deaktiviert sich HDG ja dann, wenn VOR LOC tatsächlich das Flugzeug kontrolliert.
Nähern wir uns also nun in diesem Beispiel dem Radial immer weiter, so wird irgendwann der magentafarbene Balken im HSI (ND) von seiner jetzigen Anschlag-Position nach links wandern. Etwa wenn der Balken die erste Markierung überschreitet (die vier weißen Kreise im HSI), schaltet sich HDG dann ab und VOR LOC übernimmt. Hier wird also dann eine Linkskurve eingeleitet. Das Flugzeug pendelt sich dann genau auf dem Radial ein und folgt diesem, bis der Empfang zum VOR abbricht.
Hinweis: Will man auf der selben gedachten Linie nach rechts schwenken, sollte man das Radial 90 einstellen.
In der Abbildung oben ist nun noch ein weiterer Kippschalter im Autopilot-Panel markiert. Mit diesem Schalter kann man im FS nun wählen, ob man einem Radial eines VORs folgen will (NAV) oder ob man dem im GPS eingespeicherten Flugweg folgen will (GPS). Im GPS-Modus reagiert das Flugzeug sofort; egal wie weit man vom Flugweg entfernt ist, schaltet sich HDG sofort ab.
Man sollte wissen, dass diese Nutzung des GPS nur im Flight Simulator so funktioniert. Im echten Flugzeug existiert kein Hand-GPS oder NAV/GPS-Schalter wie im FS. Vielmehr ist dort das GPS im Boardcomputer FMC enthalten und das Fliegen nach GPS würde etwas anders aktiviert. Dazu kommen wir aber, wenn wir das FMC behandeln und eine entsprechende Maschine besprechen (iFly 747).
Kommen wir nun zur automatischen Landung:
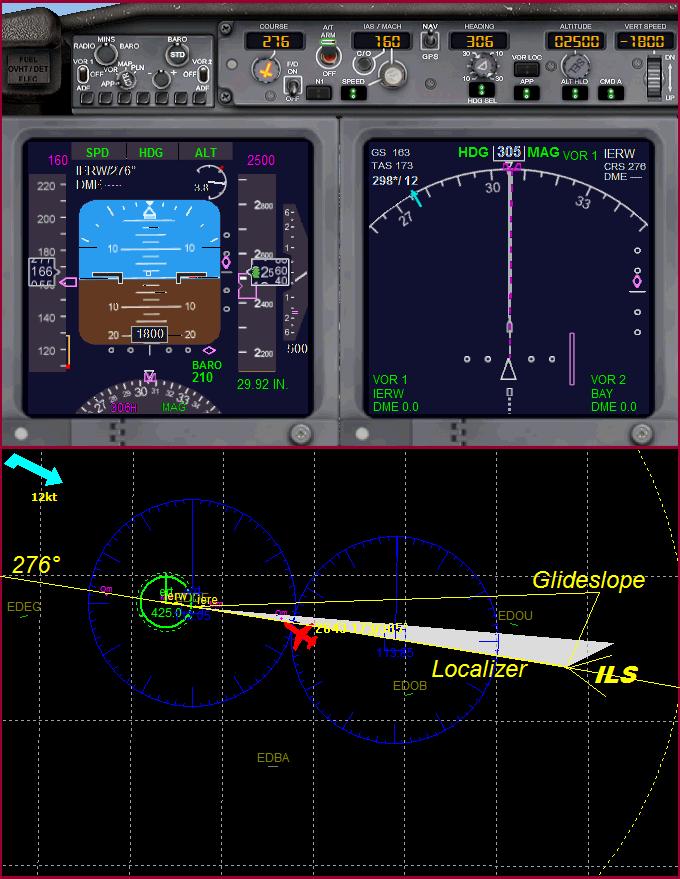
(Per Klick auf das Bild vergrößern)
Momentan haben wir das selbe Bild. Der Autopilot fliegt im Modus ALT/HDG/SPEED. Allerdings ist nun APP zusätzlich angewählt.
Außerdem haben wir das ILS der Piste 28 in Erfurt (Kennung IERW, Frequenz 109,9, Pistenausrichtung 276°) eingestellt. Im Grund ist der Ablauf genauso wie bei einem Radial. Die Wahl des COURSE 276 legt eine virtuelle Linie durch die Piste mit eben diesem Kurs. Man könnte durchaus auch mit dem VOR LOC - Modus direkt über die Piste hinweg fliegen. Doch das Gleiche macht eben auch APP. Sobald man nah genug am Localizer der Piste ist (also quasi im Radial 276), deaktiviert sich HDG und der Autopilot fliegt dann genau auf der Verlängerung der Pistenmittellinie auf die Landebahn zu (man muss den genauen Kurs der Piste eingestellt haben - die Angaben dazu finden sich immer bei den Daten eines ILS).
Zusätzlich wird aber durch den APP-Modus auch noch der Gleitpfad (Glideslope) beobachtet (magentafarbene Raute rects im ND und links vom Höhenmesser im PFD). Nähert man sich diesem in der Höhe an, schaltet sich ALT ab und der Autopilot sinkt genau auf dem Gleitpfad gleichmäßig bis zur Piste.
Bei den ganz modernen Flugzeugen geht das sogar soweit, dass zum Schluss der Radarhöhemesser zur genauen Überwachung der Höhe über Grund herangezogen wird und die Maschine sich automatisch weich auf die Piste setzt. Allerdings sollte man sich darauf nur verlasssen, wenn die Maschine wirklich diese Fähigkeit hat - ansonsten kracht man mit dem Sinkwinkel des Gleitpfades auf die Piste - das Bugrad wirds danken.
Im Bild oben sieht man ein beispiel, wie eine ILS-Landung per Autopilot nicht klappt: Ich fliege dort noch relativ weit vom Localizer entfernt, habe aber bereits fast den Glideslope durchbrochen. Eigentlich sollte nun ALT deaktiviert werden und die Flughöhe vom APP kontrolliert werden. Da ich aber noch nicht auf dem Localizer fliege, macht das der Autopilot nicht! Der Glideslope eines ILS ist nämlich nur direkt auf dem Localizer (also in der gedachten Pistenverlängerung) gültig, das heißt garantiert frei von Hindernissen, gegen die man fliegt.
Würde der Autopilot also jetzt schon dem Glideslope folgen, könnte ich in einen Funkturm o. ä. krachen, weil ich neben dem Localizer fliege.
Dem Glideslope wird nur gefolgt, wenn man ihn direkt auf dem Localizer von unten her durchbricht. Würde ich also nun auf 2500ft bleiben und später auf den Localizer geleitet, würde sich ALT trotzdem nicht abschalten - die dann nötige Sinkrate würde der Autopilot nicht einleiten. Daher muss ich in dieser Situation manuell weiter sinken, um unter dem Gleitpfad zu bleiben, bis ich den Localizer "einfange". Erst dann schaltet sich zunächst HDG ab und danach auch ALT.
Ganz gute Erfahrungen habe ich mit folgendem Vorgehen gemacht: Man schaltet SPEED, ALT und HDG ein, um das Flugzeug zu steuern. Man schaltet APP auch ein. Dann fliegt man das Flugzeug auf 3000ft mit einem Winkel von ca. 30° (Abweichung zm Landekurs) auf den etwa 20nm vom Flughafen entfernten Teil des ILS zu. Damit sollte eine automatische Landung klappen. Ganz genau geht man aber, wenn man sich das ILS auf den Karten genau ansieht. Man kann dort den genauen Sinkwinkel des Gleitpfades usw. ablesen. Diese Werte sind nämlich durchaus unterschieldich bei verschiedenen Flughäfen.
Am besten kann der Autopilot die Maschine übrigens genau auf die Landebahn leiten, wenn man möglichst langsam (aber nicht am Rande des Strömungsabrisses) fliegt. Daher stelle ich bei einer 737 zum Beispiel so etwas um die 150, 160kts ein - je nach Beladung natürlich. Ist man ganz faul, so kann man noch Autobrake (meist der Schalter neben dem Fahrwerkshebel) ein. Dann bremst der Autopilot die Maschine nach dem Aufsetzen automatisch herunter bis zum Stillstand (allerdings werden NUR die Radbremsen bedient).
So, nun kann jeder automatisch landen lassen, wenn die Maschine selbst dazu in der Lage ist. Aber dass mir keiner das Landen verlernt! Bei Wind ist der Autopilot damit sowieso überfordert - außerdem hat nicht jeder Flughafen seine Pisten mit ILS ausgestattet!
|


